AI systems research and open datasets
Isomorphic Machine Superintelligence
AI Research Hub by Yatin Taneja for Superintelligence, Agentic Infrastructure, Cognitive Architecture, AI Safety, and Large-Scale Synthetic Training Data.
Letter of Superintelligence
Understanding Superintelligence.
A focused introduction to the philosophy behind Isomorphic Machine Superintelligence: structural alignment between generalized cognition, agentic systems, and the hardware/software substrate that executes intelligence.
It also explains the knowledge hub, the open datasets, the agentic infrastructure behind the work, and the long-term direction of multimodal superintelligent systems.
Read the Full LetterOpen training material and environments
Datasets and RL benchmarks for agentic engineering.
Structured task corpora and executable benchmark environments for reasoning, tool use, safety analysis, clinical workflows, and multimodal software operation.
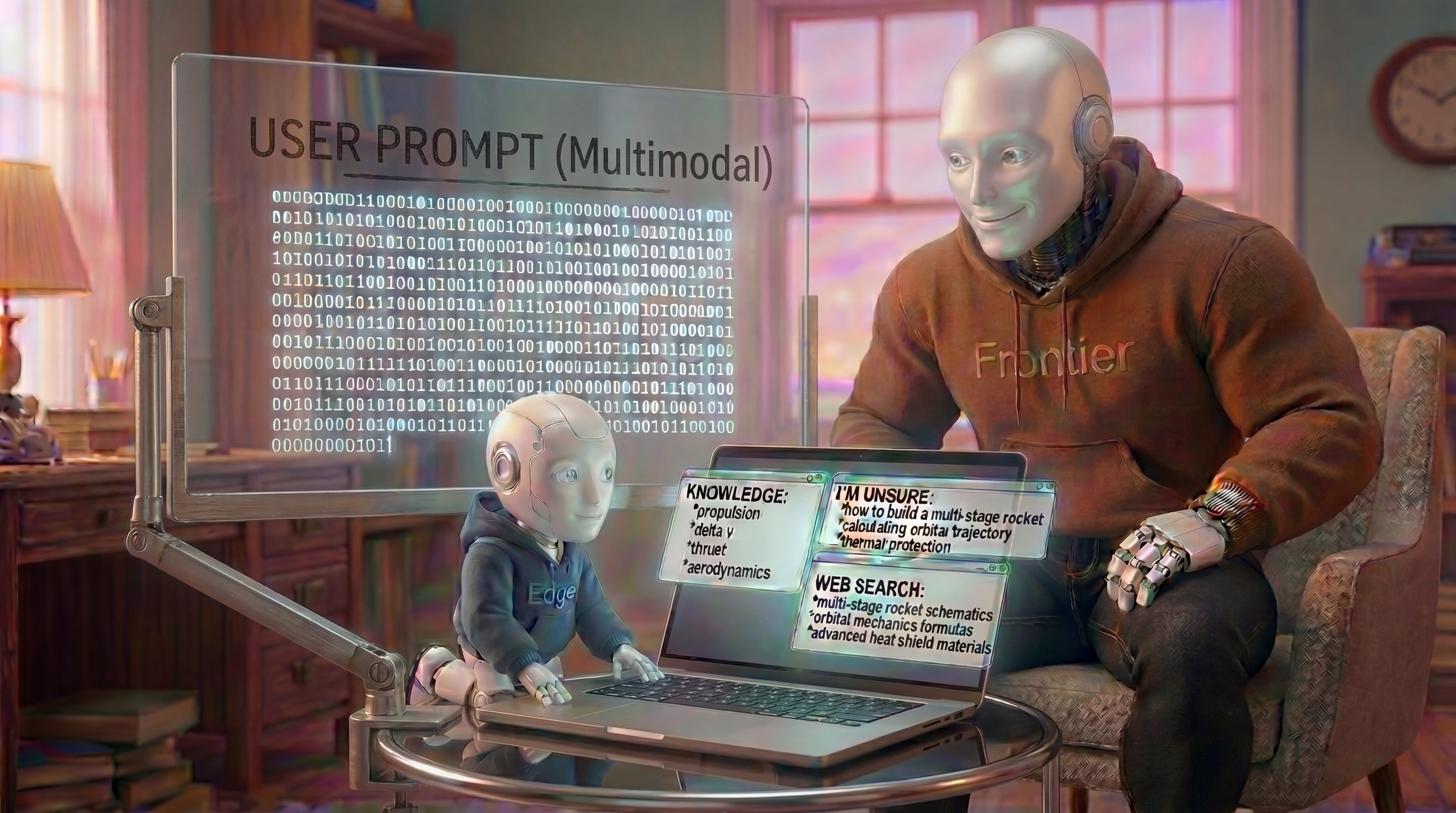
Edge Agent Reasoning WebSearch 260K
A 260K-row reasoning corpus for training small and edge-deployed agents to deconstruct complex requests, identify uncertainty, build verification plans, and generate expert web-search queries before a stronger frontier model executes the task.

Creative Professionals Agentic Tasks 1M
A 1.07M-operation synthetic task matrix for training multimodal agents to interpret high-level creative intent and translate it into software-native actions across design, 3D, video, audio, brand, photography, and engineering tools.

White Hat Security Agent Prompts 600K
A practitioner-perspective corpus of 596K contextual security prompts that teaches models to reason from inside live defensive operations: incident response, red-team simulation, threat intelligence, post-mortems, CISO review, and AI safety.

Audio/Video Engineering Agentic Tasks 1M
A focused 1.03M-operation dataset for training agents inside DAW and NLE environments, built around mid-session troubleshooting, dense conversational instructions, timeline reasoning, routing changes, sonic repair, color matching, and edit execution.
Adversarial Agent Intent Safety Analysis 240K
A 242,454-row adversarial safety corpus for command-and-control models, guardrail classifiers, and red-team agents. Each record separates a request's plausible surface interpretation from its deeper capability footprint, then produces an intent audit and authorization-focused clarifying questions.
Blood Pathology LIMS Environment
An OpenEnv-compatible FastAPI benchmark that places an agent inside a simulated hospital Laboratory Information Management System. The model must inspect pending cases, demographics, medications, lab orders, current and previous results, reference ranges, and then submit an ICD-10-coded diagnostic report.

Digital Hospital Environment
An open-source clinical AI benchmark environment for agents operating inside structured hospital workflows. It combines role-specific knowledge checks, patient-facing clinical operations, cross-role communication, deterministic grading, dense process rewards, and rollout capture.
Edge Agent Reasoning WebSearch 260K
A 260K-row reasoning corpus for training small and edge-deployed agents to deconstruct complex requests, identify uncertainty, build verification plans, and generate expert web-search queries before a stronger frontier model executes the task.
Creative Professionals Agentic Tasks 1M
A 1.07M-operation synthetic task matrix for training multimodal agents to interpret high-level creative intent and translate it into software-native actions across design, 3D, video, audio, brand, photography, and engineering tools.
White Hat Security Agent Prompts 600K
A practitioner-perspective corpus of 596K contextual security prompts that teaches models to reason from inside live defensive operations: incident response, red-team simulation, threat intelligence, post-mortems, CISO review, and AI safety.
Audio/Video Engineering Agentic Tasks 1M
A focused 1.03M-operation dataset for training agents inside DAW and NLE environments, built around mid-session troubleshooting, dense conversational instructions, timeline reasoning, routing changes, sonic repair, color matching, and edit execution.
Adversarial Agent Intent Safety Analysis 240K
A 242,454-row adversarial safety corpus for command-and-control models, guardrail classifiers, and red-team agents. Each record separates a request's plausible surface interpretation from its deeper capability footprint, then produces an intent audit and authorization-focused clarifying questions.
Blood Pathology LIMS Environment
An OpenEnv-compatible FastAPI benchmark that places an agent inside a simulated hospital Laboratory Information Management System. The model must inspect pending cases, demographics, medications, lab orders, current and previous results, reference ranges, and then submit an ICD-10-coded diagnostic report.
Digital Hospital Environment
An open-source clinical AI benchmark environment for agents operating inside structured hospital workflows. It combines role-specific knowledge checks, patient-facing clinical operations, cross-role communication, deterministic grading, dense process rewards, and rollout capture.
About Yatin
AI systems engineer, business-trained operator, and creative technologist.

Yatin Taneja is a growth-driven business expert and AI systems engineer with an MBA in Marketing and International Business. He has trained and managed AI teams of up to 30 members, including pod leads and individual AI trainers working on MAANG AI projects across text, vision, audio, video, GUI, SFT, and RLHF workflows.
His work combines multimodal dataset construction, high-precision AI agents, adversarial prompt engineering, AI music understanding, audio engineering, technical documentation, full-stack AI applications, model benchmarking, and superintelligence research.
As a musician, poet, and designer with certifications from institutions including the University of London, Wharton, University of Michigan, Google, and Microsoft, he approaches agentic systems from both engineering and creative perspectives.
Knowledge Hub
Long-Form Research Across Computational Intelligence
Cultural Impact of Superhuman Creativity
Generative models such as GPT4 and Midjourney have established a new framework in content creation by producing text and images with a...
Archival Retrieval from Historical Data Repositories
Transgenerational memory defines the capacity of artificial intelligence systems to retain and access knowledge from prior human or AI...
Digital Minds & Substrate Independence in Posthuman Futures
Digital minds refer to the theoretical replication of human cognitive processes in computational substrates, enabling consciousness or...
Problem of Decoherence in Quantum AI: Error Correction via Surface Codes
Decoherence constitutes the core impediment to the realization of stable quantum computation, making real as the irreversible loss of quantum...
Use of Bayesian Optimization in Hyperparameter Tuning: Gaussian Processes for Efficiency
Hyperparameter tuning constitutes a critical phase in the development of machine learning systems where specific configurations established...

AI for Development
Deploying artificial intelligence in lowresource settings demands a rigorous adaptation of models and infrastructure to function effectively...
Common Sense Reasoning: the Implicit Knowledge Humans Take for Granted
Common sense reasoning encompasses the implicit knowledge humans utilize to manage daily life without explicit instruction, operating as a...
Economic Singularity: How Superintelligence Creates Post-Scarcity
Current machine learning models have successfully integrated into the complex operational frameworks of global logistics giants such as Maersk...

Singleton Scenario: Unipolar Superintelligence Control
Nick Bostrom introduced the concept of the Singleton scenario in his 2014 analysis regarding machine superintelligence, defining it as a...

PAC-Bayes Bound for Superintelligence: Generalization in Non-Stationary Environments
Superintelligence will operate within environments characterized by continuous and unpredictable shifts in data distributions, rendering...
Gradient-Based Meta-Learning: the Hessian-Free Optimization of Learning Algorithms
Gradientbased metalearning functions by finetuning the learning algorithm itself rather than merely adjusting model parameters through standard...
Public Speaking Coach
Public speaking coaching has historically depended on human observation, subjective feedback, and experiencebased intuition to improve speaker...
Collective Intelligence
Collective intelligence is the combined capability arising from structured interaction between humans and artificial systems, forming a complex...
Five Technical Pathways to Superintelligence We're Pursuing Today
The pursuit of superintelligence currently develops through five distinct technical pathways, each operating on unique foundational assumptions...